PX4 Controls
Donghee Park
Created: 2017-03-23 목 01:03
1 PX4의 제어 구성

2 기체별 제어 모듈
- Navigator: 미션 입력받아 GPS 위치와 기체 속도 제어
- Estimator: 센서입력 받아서 현재 위치 추정(estimate)
- Controller: 자세와 위치 제어
| Fixed Wing | Multi Copter | VTOL | |
|---|---|---|---|
| Navigator | navigator |
navigator |
navigator |
| Estimator | ekf_att_pos_estimator |
attitude_estimator_q, position_estimator_inav |
attitude_estimator_q, position_estimator_inav |
| Controller | attitude_estimator_q, position_estimator_inav |
attitude_estimator_q, position_estimator_inav |
vtol_att_control, mc_att_control, mc_pos_control, fw_att_control, fw_pow_control_l1 |
3 비행제어 관련 주요 uORB Topics
3.1 navigator uORB Topics
Published messages
fence,actuator_controls_2,vehicle_command,geofence_result,vehicle_attitude_setpoint,position_setpoint_triplet,mission_result
Subscribed messages
follow_target,onboard_mission,offboard_mission,fw_pos_ctrl_status,vehicle_global_position,vehicle_local_position,vehicle_gps_position,sensor_combined,home_position,fw_pos_ctrl_status,vehicle_status,vehicle_land_detected,vehicle_control_mode,parameter_update,vehicle_command,
3.2 attitude_estimator_q uORB Topics
Published messages
vehicle_attitudecontrol_state
Subscribed messages
sensor_combinedvision_position_estimateatt_pos_mocapairspeedparameter_updatevehicle_global_position
3.3 mc_att_control uORB Topics
Published messages
- …
Subscribed messages
- …
4 MC Attitude Controller
http://uav-lab.org/2016/08/15/px4-research-log-7-a-closer-look-at-mc_att_control/
http://www.starlino.com/wp-content/uploads/data/dcm_tutorial/Starlino_DCM_Tutorial_01.pdf
4.1 관련 개념
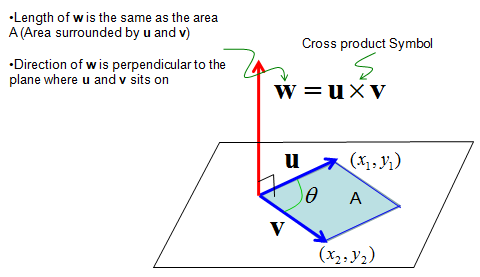
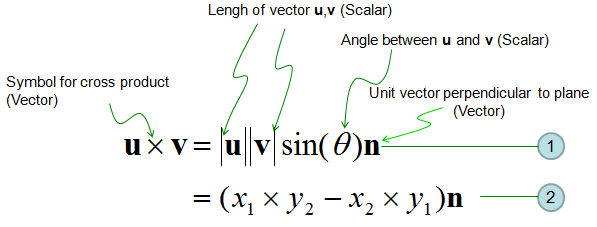
4.1.1 Cross Product
두개의 벡터가 이루는 하나의 평면에 대해 수직인 벡터를 구한다. 외적은 두 벡터가 이루는 각을 구한다.
4.1.2 Coordinate Frames
coordinate system에서 사용하는 매트릭스의 요소들의 의미.???? 뭘 나타내나? 방향?
- Rotation Matrices
Rotates a given vector
http://mathworld.wolfram.com/RotationMatrix.html http://nisl.kau.ac.kr/easy1.pdf
2차원에서 원점 중심의 θ 반시계회전
\begin{align} { R }_{ \theta }=\begin{matrix} \begin{bmatrix} \cos { \theta } & -\sin { \theta } \\\ \sin { \theta } & \cos { \theta } \end{bmatrix} \end{matrix} \end{align}Rotates the coordinate system
\begin{align} R=\begin{bmatrix} \cos { \theta } \cos { \psi } & \sin { \phi } \sin { \theta } \cos { \psi } -\cos { \theta } \sin { \psi } & \cos { \phi } \sin { \theta } \cos { \psi } +\sin { \theta } \sin { \psi } \\\ \cos { \theta } \sin { \psi } & \sin { \phi } \sin { \theta } \sin { \psi } +\cos { \theta } \cos { \psi } & \cos { \phi } \sin { \theta } \sin { \psi } -\sin { \theta } \cos { \psi } \\\ -\sin { \theta } & \sin { \phi } \cos { \theta } & \cos { \phi } \cos { \theta } \end{bmatrix} \end{align}
4.2 attitude control
개요:
- mutirotor의 yaw보다 roll과 pitch 반응이 빨라서, 먼저 roll 과 pitch를 제어하고, thrust vector를 제어. yaw의 편차(deviation)를 줄이기 위해 필요이상으로 클때 기체의 z축을 회전시킨다. (yaw제어 보다 thrust vector의 반응성을 빠르게 하는것이 3d position control 하는데 유리!)
- ? singlularity problem? yaw 에러는 무시!
- target 자세의 z축과 current 자세의 z축이 90~270 이면, 평소대로 yaw제어.
Rate controller is PD, attitude controller is P.
851 vehicle_attitude_setpoint_poll(); // setpoint(target)가 변경되었는지 체크. 변경 되었으면 _v_att_sp에 새값 반영 857 math::Matrix<3, 3> R_sp = q_sp.to_dcm(); // setpoint DCM(eart frame -> target body frame) 861 math::Matrix<3, 3> R = q_att.to_dcm(); 869 /* axis and sin(angle) of desired rotation */ 870 math::Vector<3> e_R = R.transposed() * (R_z % R_sp_z); // R_z(R의 z축) R_sp_z(R_sp의 z축) 외적. 872 /* calculate angle error */ 873 float e_R_z_sin = e_R.length(); 874 float e_R_z_cos = R_z * R_sp_z; /* get axis-angle representation */ 884 float e_R_z_angle = atan2f(e_R_z_sin, e_R_z_cos); 885 math::Vector<3> e_R_z_axis = e_R / e_R_z_sin; 887 e_R = e_R_z_axis * e_R_z_angle;
R_z is z axis of rotation matrix R
R_sp_z z axis of setpoint rotation matrix Rsp
e_R desired rotation
백터 a, b에서 b로 회전하는 최단거리 구하기. axis = cross(a, b) / length(cross(a, b)) angle = atan2(length(cross(a, b)), dot(a, b))
관련 메일링 https://groups.google.com/forum/#!topic/px4users/JQEfx8uoFrs
–from https://groups.google.com/forum/#!searchin/px4users/mc_att_control_vector|sort:relevance/px4users/4Ik4mKdxVlc/uOJ4WqqFJuUJ I'm working on new vector attitude and position controllers for multirotors. It's complete in general, but needs testing. Video of HIL test flight, default parameters: https://dl.dropboxusercontent.com/u/19100065/Vector Control HIL Test.mp4
Attitude controller uses rotation matrix and thrust as setpoint and doesn't use euler angles for control (euler angles generated only for logging). This allows to avoid singularities and make true 3D controller, that able to do flips and loops. When controller rotates vehicle it takes into account that yaw responce is relatively slow and tryes to move thrust vector by closest way, to make thrust vector respone fast, it is necessary for position control. Yaw can be not holded during very aggressive maneures, but corrected all the time, so for normal flight user shouldn't notice difference, but for 3D flights it helps to avoid yaw related singularity problems.
Position controller now uses clear vector dynamic model: d(pos) / dt = vel; d(vel) / dt = acc; acc = F / m = k * thrust. Without strict separation of axes, only parameters can be set differently, but as you can see they are almost equal for XY and Z. Controller simply sets rotation and thrust to get desired acceleration. Controller even may want to get acceleration downside to stop fast climbing, and vehicle will be flipped upside down for some time. Also controller has some parameters that allows to limit min/max thrust and tilt, that is useful e.g. for flying with camera gimbal with limited rotation range. Also it has protection against altitude drop caused by very large velocity. First, XY components of thrust vector limited, then if it's not enough, Z component. So if user sets max horizontal speed MPCXYVELMAX = 100 (360km/h, too much for normal copter :) ), copter will go with max possible speed that will allow to keep altitude. All velocity vector components limited together by ellipsoid, i.e. if max speed for XY and Z is 10m/s, and user commands 10m/s forward and 10m/s up, resulting speed will be 10/sqrt(2) m/s forward and 10/sqrt(2) m/s up, so absolute speed will be 10m/s.
-—
Hi!
There is no any reference site, because it's my own idea :)
I will try to clarify:
Rz is z axis of rotation matrix R, i.e. z axis of copter body
= axis that looks downside (because we use North-East-Downside frame) from copter body =vector of length 1 opposite to thrust vector The same with Rspz, it's vector of length 1 opposite to desired thrust vector Cross product of these two vectors will give vector with length sin(anglebetweenRzandRspz) and directed by axis by rotation. I.e. this way we get shortest rotation from one vector to another. But this vector is in earth frame, not in body frame, while we need to get rotation in body frame (we control body rates, not eath rates), so need to rotate eR back via R.transposed().
As you see eR is desired rotation, but vector length is sin(angle), not angle (it's the same in small angles approximation, but we work with big angles too), so if we need to get angle we have to save vector direction but set length to 'angle', i.e. " * angle / sin(angle)" After this calculations we got rotation for thrust vector, but we forgot about yaw, it's not so important for position control but we still want to control it. To calculate desired yaw we need to know orientation of copter after our main roll/pitch rotation, it's Rrp. Then we calculate difference between resulting roll/pitch rotation and setpoint. They have the same Z axis, so we can use X axis of setpoint (Rsp) and result after roll/pitch rotation (Rrp). This vector (Rrpx % Rspx) will be collinear with Rspz, so multiplying it by Rspz we simply get projection to setpoint body Z axis. Rrpx * Rspx give cos of angle between Xsetpoint and X after roll/pitch rotation. From sin and cos we can calculate angle using atan2. yaww = Rsp(2, 2) * Rsp(2, 2), i.e. for level/upside down orientation it will be 1, for e.g. roll=90 it will be 0. We need this weight to avoid useless yaw control near singularity. I.e. when e.g. pitch=90, roll is the same as yaw, and resulting yaw after full maneur will depend significantly on path of thrust vector, so don't try to control it yet.
Yes it's average of two approaches: "shortest thrust path" and "single axis" rotations. We use the second approach only for large rotations (> 90deg), see line 645: if (eRzcos < 0.0f) { In this case "shortest thrust path" has singularity, e.g. for thrust vector flipping all paths are equal, BUT there are only two paths (actually one will be always a bit shorter) that will give use desired yaw, and these paths given by "single axis" approach. I hope this helps :)
If you have more questions please contact me directly, you wil find my email in source header ;)
– Anton
–from https://groups.google.com/forum/#!topic/px4users/ln3yzqF6Vz0
5 Simpler Attitude Controller
고정익 자세제어 간단 버전
https://github.com/PX4/Firmware/tree/master/src/examples/fixedwing_control
https://github.com/PX4/Firmware/blob/master/src/examples/fixedwing_control/main.cpp
parameters_init(struct param_handles *h); parameters_update(const struct param_handles *h, struct params *p); ex_fixedwing_control_main(int argc, char *argv[]); int fixedwing_control_thread_main(int argc, char *argv[]); void control_attitude(const struct vehicle_attitude_setpoint_s *att_sp, const struct vehicle_attitude_s *att, struct vehicle_rates_setpoint_s *rates_sp, struct actuator_controls_s *actuators); void control_heading(const struct vehicle_global_position_s *pos, const struct position_setpoint_s *sp, const struct vehicle_attitude_s *att, struct vehicle_attitude_setpoint_s *att_sp);
5.1 Simpler Attitude Controller 코드에 펌웨어에 추가하기
Firmware/cmake/configs/nuttx_px4fmu-v2_default.cmake 에 다음 추가
examples/fixedwing_control
5.2 fixedwing_control 실행
쉘에서 실행
nsh> ex_fixedwing_control start
부팅시 자동 실행
Firmware/ROMFS/px4fmu_common/init.d/rc.fw_apps 수정 (fw_att_control, fw_pos_control_l1 대신)
# Start attitude controller # # fw_att_control start # fw_pos_control_l1 start ex_fixedwing_control start
5.3 Simpler Attitude Controller 분석
https://github.com/PX4/Firmware/blob/master/src/examples/fixedwing_control/main.cpp
6 새로운 비행제어기 추가하기
모드 이름: HankongMode
http://uav-lab.org/2016/11/07/px4-research-log-10-adding-a-new-flight-mode-preparation/
hankong_controlApp 추가
1.1 CMakeList.txt
px4_add_module(
MODULE modules__hankong_control
MAIN hankong_control
COMPILE_FLAGS -Os
STACK_MAIN 1200
SRCS
hankong_control.cpp
DEPENDS
platforms__common
)
1.2 hankong_control.cpp
#include <px4_config.h> #include <px4_defines.h> #include <px4_tasks.h> #include <px4_posix.h> #include <stdio.h> #include <stdlib.h> #include <string.h> #include <unistd.h> #include <errno.h> #include <math.h> #include <poll.h> #include <drivers/drv_hrt.h> #include <arch/board/board.h> #include <uORB/uORB.h> #include <uORB/topics/vehicle_command.h> #include <uORB/topics/vehicle_attitude.h> #include <uORB/topics/vehicle_attitude_setpoint.h> #include <uORB/topics/vehicle_rates_setpoint.h> #include <uORB/topics/control_state.h> #include <uORB/topics/vehicle_control_mode.h> #include <uORB/topics/vehicle_status.h> /* * flip_control.cpp * * Created on: 28Sep.,2016 * Author: Zihao */ extern "C" __EXPORT int flip_control_main(int argc, char *argv[]); class FlipControl { public: /** * Constructor */ FlipControl(); /** * Destructor, also kills the main task */ ~FlipControl(); /** * Start the flip state switch task * * @return OK on success */ int start(); /** * This function handles the Mavlink command long messages * It will execute appropriate actions according to input */ void handle_command(struct vehicle_command_s *cmd); /** * little function to print current flip state */ void print_state(); /** * check for changes in vehicle control mode */ void vehicle_control_mode_poll(); private: bool _task_should_exit; /**< if true, main task should exit */ int _flip_task; /**< task handle */ enum FLIP_STATE { FLIP_STATE_DISABLED = 0, FLIP_STATE_START = 1, FLIP_STATE_ROLL = 2, FLIP_STATE_RECOVER = 3, FLIP_STATE_FINISHED = 4 }_flip_state; /**< flip state */ /* subscriptions */ int _command_sub; int _vehicle_control_mode_sub; int _vehicle_attitude_sub; /* publications */ orb_advert_t _vehicle_control_mode_pub; orb_advert_t _vehicle_rates_setpoint_pub; struct vehicle_command_s _command; /**< vehicle commands */ struct vehicle_control_mode_s _vehicle_control_mode; /**< vehicle control mode */ struct vehicle_attitude_s _attitude; /**< vehicle attitude */ struct vehicle_rates_setpoint_s _vehicle_rates_setpoint; /**< vehicle rate setpoint */ /** * Shim for calling task_main from task_create */ static void task_main_trampoline(int argc, char *argv[]); /** * Main attitude control task */ void task_main(); }; namespace flip_control { FlipControl *g_flip; } FlipControl::FlipControl() : _task_should_exit(false), _flip_task(-1), _flip_state(FLIP_STATE_DISABLED), _command_sub(-1), _vehicle_control_mode_sub(-1), _vehicle_attitude_sub(-1), _vehicle_control_mode_pub(nullptr), _vehicle_rates_setpoint_pub(nullptr) { memset(&_command, 0, sizeof(_command)); memset(&_vehicle_control_mode, 0, sizeof(_vehicle_control_mode)); memset(&_attitude, 0, sizeof(_attitude)); memset(&_vehicle_rates_setpoint, 0, sizeof(_vehicle_rates_setpoint)); } FlipControl::~FlipControl() { _task_should_exit = true; flip_control::g_flip = nullptr; } void FlipControl::print_state() { warnx("Current flip state is %d", _flip_state); } void FlipControl::handle_command(struct vehicle_command_s *cmd) { switch (cmd->command) { case vehicle_command_s::VEHICLE_CMD_FLIP_START: warnx("Flip initiated"); _flip_state = FLIP_STATE_START; break; case vehicle_command_s::VEHICLE_CMD_FLIP_TERMINATE: warnx("Flip terminated"); _flip_state = FLIP_STATE_FINISHED; break; } } void FlipControl::vehicle_control_mode_poll() { bool updated; /* check if vehicle control mode has changed */ orb_check(_vehicle_control_mode_sub, &updated); if (updated) { orb_copy(ORB_ID(vehicle_control_mode), _vehicle_control_mode_sub, &_vehicle_control_mode); } } void FlipControl::task_main_trampoline(int argc, char *argv[]) { flip_control::g_flip->task_main(); } void FlipControl::task_main() { /* make sure slip_state is disabled at initialization */ _flip_state = FLIP_STATE_DISABLED; // inner loop sleep time const unsigned sleeptime_us = 50000; // first phase roll or pitch target float rotate_target_45 = 45*3.14/180; // second phase roll or pitch target // float rotate_target_90 = 89*3.14/180; // rotate rate set point float rotate_rate = 400*3.14/180; // use this to check if a topic is updated bool updated = false; int poll_interval = 100; // listen to the topic every x millisecond /* subscribe to vehicle command topic */ _command_sub = orb_subscribe(ORB_ID(vehicle_command)); /* subscribe to vehicle control mode topic */ _vehicle_control_mode_sub = orb_subscribe(ORB_ID(vehicle_control_mode)); /* subscribe to vehicle attitude topic */ _vehicle_attitude_sub = orb_subscribe(ORB_ID(vehicle_attitude)); /* advertise control mode topic */ _vehicle_control_mode_pub = orb_advertise(ORB_ID(vehicle_control_mode), &_vehicle_control_mode); /* advertise rate setpoint topic */ _vehicle_rates_setpoint_pub = orb_advertise(ORB_ID(vehicle_rates_setpoint), &_vehicle_rates_setpoint); /* * declare file descriptor structure, # in the [] means the * # of topics, here is 1 since we are only * polling vehicle_command */ px4_pollfd_struct_t fds[1]; /* * initialize file descriptor to listen to vehicle_command */ fds[0].fd = _command_sub; fds[0].events = POLLIN; /* start main slow loop */ while (!_task_should_exit) { /* set the poll target, number of file descriptor, and poll interval */ int pret = px4_poll(&fds[0], (sizeof(fds) / sizeof(fds[0])), poll_interval); /* * this means no information is coming from the topic in the set interval * skip loop */ if (pret == 0) { continue; } /* * this means some error happened, I don't know what to do * skip loop */ if (pret < 0) { warn("poll error %d %d", pret, errno); continue; } /* * if everything goes well, copy the command into our variable * and handle command */ if (fds[0].revents & POLLIN) { /* * copy command structure from the topic to our local structure */ orb_copy(ORB_ID(vehicle_command), _command_sub, &_command); handle_command(&_command); } /* * check for updates in other topics */ vehicle_control_mode_poll(); /* * switch to faster update during the flip */ while ((_flip_state > FLIP_STATE_DISABLED)&&(_vehicle_control_mode.flag_control_flip_enabled)){ // update commands orb_check(_command_sub, &updated); if (updated) { orb_copy(ORB_ID(vehicle_command), _command_sub, &_command); handle_command(&_command); } bool topic_changed = false; // copy vehicle control mode topic if updated vehicle_control_mode_poll(); // disable _v_control_mode.flag_control_manual_enabled if (_vehicle_control_mode.flag_control_manual_enabled) { _vehicle_control_mode.flag_control_manual_enabled = false; topic_changed = true; } // disable _v_control_mode.flag_conttrol_attitude_enabled if (_vehicle_control_mode.flag_control_attitude_enabled) { _vehicle_control_mode.flag_control_attitude_enabled = false; topic_changed = true; } // publish to vehicle control mode topic if topic is changed if (topic_changed) { orb_publish(ORB_ID(vehicle_control_mode), _vehicle_control_mode_pub, &_vehicle_control_mode); } // update vehicle attitude orb_check(_vehicle_attitude_sub, &updated); if (updated) { orb_copy(ORB_ID(vehicle_attitude), _vehicle_attitude_sub, &_attitude); } // decide what to do based on current flip_state switch (_flip_state) { case FLIP_STATE_DISABLED: // shoudn't even enter this but just in case // do nothing break; case FLIP_STATE_START: /* * 400 degree/second roll to 45 degrees */ { _vehicle_rates_setpoint.roll = rotate_rate; _vehicle_rates_setpoint.pitch = 0; _vehicle_rates_setpoint.yaw = 0; _vehicle_rates_setpoint.thrust = 1; orb_publish(ORB_ID(vehicle_rates_setpoint), _vehicle_rates_setpoint_pub, &_vehicle_rates_setpoint); if ((_attitude.roll > 0.0f && _attitude.roll > rotate_target_45) || (_attitude.roll < 0.0f && _attitude.roll < -rotate_target_45)) { _flip_state = FLIP_STATE_ROLL; } break; } case FLIP_STATE_ROLL: /* * 400 degree/second roll to 90 degrees */ { _vehicle_rates_setpoint.roll = rotate_rate; _vehicle_rates_setpoint.pitch = 0; _vehicle_rates_setpoint.yaw = 0; _vehicle_rates_setpoint.thrust = 0.75; orb_publish(ORB_ID(vehicle_rates_setpoint), _vehicle_rates_setpoint_pub, &_vehicle_rates_setpoint); if ((_attitude.roll > 0.0f && _attitude.roll < rotate_target_45) || (_attitude.roll < 0.0f && _attitude.roll > -rotate_target_45)) { _flip_state = FLIP_STATE_RECOVER; } } break; case FLIP_STATE_RECOVER: /* * level the vehicle */ _vehicle_control_mode.flag_control_attitude_enabled = true; orb_publish(ORB_ID(vehicle_control_mode), _vehicle_control_mode_pub, &_vehicle_control_mode); _flip_state = FLIP_STATE_FINISHED; break; case FLIP_STATE_FINISHED: /* * go back to disabled state */ // enable manual control and attitude control _vehicle_control_mode.flag_control_manual_enabled = true; _vehicle_control_mode.flag_control_attitude_enabled = true; orb_publish(ORB_ID(vehicle_control_mode), _vehicle_control_mode_pub, &_vehicle_control_mode); // switch back to disabled flip state _flip_state = FLIP_STATE_DISABLED; break; } // run at roughly 100 hz usleep(sleeptime_us); } } } int FlipControl::start() { ASSERT(_flip_task == -1); /*start the task */ _flip_task = px4_task_spawn_cmd("flip_control", SCHED_DEFAULT, SCHED_PRIORITY_DEFAULT, 2048, (px4_main_t)&FlipControl::task_main_trampoline, nullptr); if (_flip_task < 0) { warn("task start failed"); return -errno; } return OK; } int flip_control_main(int argc, char *argv[]) { /* warn if no input argument */ if (argc < 2) { warnx("usage: flip_control {start|stop|status|state}"); return 1; } /* start flip_control manually */ if (!strcmp(argv[1],"start")) { if (flip_control::g_flip != nullptr) { warnx("already running"); return 1; } flip_control::g_flip = new FlipControl; if (flip_control::g_flip == nullptr) { warnx("allocation failed"); return 1; } if (OK != flip_control::g_flip->start()) { delete flip_control::g_flip; flip_control::g_flip = nullptr; warnx("start failed"); return 1; } return 0; } /* stop flip_control manually */ if (!strcmp(argv[1], "stop")) { if (flip_control::g_flip == nullptr) { warnx("not running"); return 1; } delete flip_control::g_flip; flip_control::g_flip = nullptr; return 0; } /* return running status of the application */ if (!strcmp(argv[1], "status")) { if (flip_control::g_flip) { warnx("running"); return 0; } else { warnx("not running"); return 1; } } /* print current flip_state */ if (!strcmp(argv[1], "state")) { flip_control::g_flip->print_state(); return 0; } /* if argument is not in one of the if statement */ warnx("unrecognized command"); return 0; }
- 버튼을 누루면 yaw를 home 방향으로 돌린다.
- course lock
7 참고
- https://goo.gl/YzDzVD
- https://groups.google.com/forum/#!topic/px4users/ln3yzqF6Vz0
- 새로운 flightmode 추가하기 http://uav-lab.org/2016/11/07/px4-research-log-10-adding-a-new-flight-mode-preparation/
- 회전변환식 유도 http://blog.naver.com/PostView.nhn?blogId=dalsapcho&logNo=20144939371&categoryNo=29&viewDate=¤tPage=1&listtype=0